Hầu hết các phương thức đo trên CMM đều sử dụng hệ trục tọa độ XYZ, đây là hệ trục tọa độ Descartes (Cartesian coordinates). Đó là lý do tại sao hầu hết câu lệnh trong DMSI xuất hiện từ khóa CART.
Tuy nhiên, trong một số trường hợp bản vẽ sẽ chỉ định kích thước được thể hiện thông qua bán kính (R) và góc (angular). Đó là lý do tại sao trong cấu trúc lệnh của DMIS có hỗ trợ tùy chọn câu lệnh để tính toán theo hệ trục tọa độ này (còn gọi là hệ trục tọa độ cầu).
Khác với hệ tọa độ Descartes, hệ tọa độ cực không thể hiện tọa độ thông qua bộ 3 thông số XYZ mà chỉ thể hiện qua thông số bán kính (R) và góc (A). Vậy nên cần xác định được mặt phẳng làm việc dựa theo hướng thể hiện kích thước trên bản vẽ và hệ trục tọa độ Decartes đã thiết lập trước đó.
Để thiết lập và chỉ định mặt phẳng làm việc, chúng ta sử dụng câu lệnh WKPLAN, kèm theo sau là 3 option để chỉ định mặt phẳng là XY, YZ hoặc ZX. Việc xác định sẽ chọn mặt phẳng nào sẽ tùy thuộc vào hệ trục đang thiết lập và bản vẽ.
Ví dụ. Thiết lập mặt phẳng làm việc dọc theo trục Z (có vecter chỉ phương song song với trục Z, và chưa đề cập tới phương của vecter sẽ cùng phương với trục Z hay ngược lại)
WKPLAN/XY
Sau khi đã xác định được mặt phẳng làm việc là mặt phẳng XY. Khi đó các tùy chọn câu lệnh trong hệ tọa độ cực sẽ gắn với 2 thông số là bán kính (R) ,góc (A) và chiều cao (H) gắn với mặt phẳng làm việc này. Câu lệnh trong hệ tọa độ cực sẽ có từ khóa POL kèm theo 3 thông số về bán kính, góc và chiều cao ở trên.
Ví dụ câu lệnh di chuyển đầu đo trong hệ tọa độ cực
GOTO/POL,35.0,45.0,-10
Với trường hơp này, đầu đo sẽ di chuyển đến vị trí có tọa độ thỏa mãn khoảng cách tới gốc (bán kính R) là 35, góc hợp với hệ trục trên mặt phẳng XY là 45 độ, và cao độ Z là -10.
Với cùng tọa độ này so với gốc ban đầu, trong hệ tọa độ Descartes sẽ sử dụng câu lệnh sau
GOTO/CART,24.7487,24.7487,-10
Tùy chọn hệ tọa độ cực sẽ thuận tiện khi làm việc với các đối tượng đo đối xứng theo đường sinh tròn.
Trong hệ tọa độ Descartes, bạn cần xác định dấu của các giá trị đại diện tọa độ (nằm ở phía nào của hệ trục tọa độ), đây cũng giống như tham số chiều cao (H) trong hệ tọa độ cực, xác định nằm ở phía âm hay dương của trục Z. Trong hệ tọa độ cực, giá trị bán kính (R) luôn là một số dương, góc (A) sẽ có giá trị từ 0 tới 360 hoặc 0 đến 180 hoặc 0 đến -180. Một số trường hợp có lẽ vẫn thể hiện giá trị bán kính (R) là số âm, nhưng về ý nghĩa thực tế thì đây là đại lượng khoảng cách.
Giá trị góc (A) được xác định theo nguyên tác tam diện thuận (nguyên tắc bàn tay phải), còn vị trí thì phụ thuộc vào hướng nhìn (view direction)
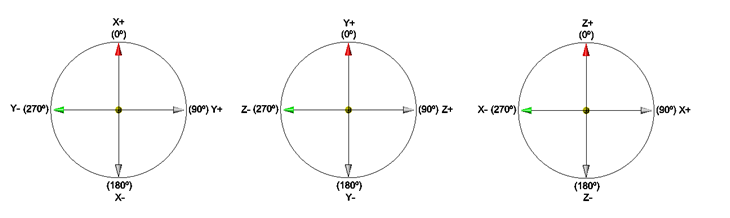
Hình trên minh họa vị trí của góc (A) trong hệ tọa độ cực theo 3 mặt phẳng làm việc. Qua đó có thể thấy vị trí (giá trị) của tham số góc (A) không phụ thuộc vào hướng nhìn mà phụ thuộc vào hướng của trục trên mặt phẳng làm việc và tuân theo nguyên tắc tam diện thuận. Dù bạn nhìn theo hướng ngược lại (từ phía sau ra phía trước) thì vị trí của các góc ko thay đổi vì nó tương quan theo hướng của các trục X,Y,Z.
Một ví dụ về ứng dụng hệ tọa độ cực trong đo kích thước các lỗ bulong như hình bên dưới
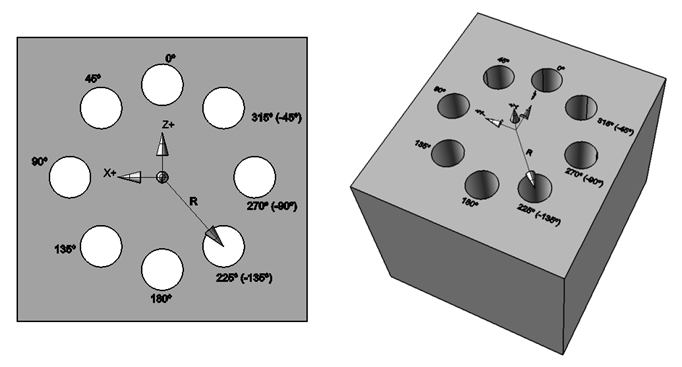
Khối lệnh bên dưới sẽ đo 8 lỗ bulong từ tâm xoay với khoảng cách chung R (giả sử R=40) và tọa độ của tâm này trên mặt phẳng làm việc XZ là X=Z=65.
$$
MODE/AUTO,PROG,MAN
$$
$$ (this offset is not on the drawing)
$$
D(THEO_BOLT_CENTER)=TRANS/XORIG,65,ZORIG,65
$$
WKPLAN/ZXPLAN
$$
F(C1)=FEAT/CIRCLE,INNER,POL,40.0,0.0,-2,0.0,1.0,0.0,5.0
MEAS/CIRCLE,F(C1),4
ENDMES
F(C2)=FEAT/CIRCLE,INNER,POL,40.0,45.0,-2,0.0,1.0,0.0,5.0
MEAS/CIRCLE,F(C2),4
ENDMES
F(C3)=FEAT/CIRCLE,INNER,POL,40.0,90.0,-2,0.0,1.0,0.0,5.0
MEAS/CIRCLE,F(C3),4
ENDMES
F(C4)=FEAT/CIRCLE,INNER,POL,40.0,135.0,-2,0.0,1.0,0.0,5.0
MEAS/CIRCLE,F(C4),4
ENDMES
F(C5)=FEAT/CIRCLE,INNER,POL,40.0,180.0,-2,0.0,1.0,0.0,5.0
MEAS/CIRCLE,F(C5),4
ENDMES
F(C6)=FEAT/CIRCLE,INNER,POL,40.0,-135.0,-2,0.0,1.0,0.0,5.0
MEAS/CIRCLE,F(C6),4
ENDMES
F(C7)=FEAT/CIRCLE,INNER,POL,40.0,-90.0,-2,0.0,1.0,0.0,5.0
MEAS/CIRCLE,F(C7),4
ENDMES
F(C8)=FEAT/CIRCLE,INNER,POL,40.0,-45.0,-2,0.0,1.0,0.0,5.0
MEAS/CIRCLE,F(C8),4
ENDMES
$$
Từ khối lệnh phía trên, bạn có thể thấy được ban đầu là lệnh di chuyển hệ trục về tâm đường tròn đi qua tâm của 8 lỗ bulong. Sau đó thiết lập mặt phẳng làm việc là mặt phẳng XZ. Nếu quan sát kỹ, bạn sẽ thấy các dòng code lệnh đo các lỗ bulong chỉ khác nhau về tham số góc (A). Điều này giúp cho việc viết code nhanh hơn vì chỉ việc thay đổi thông số góc và cũng có thể dễ dàng kêt hợp với các vòng lặp và truyền biến vào tham số để tùy biến lệnh dễ dàng hơn.
Dưới đây là ví dụ về ứng dụng hệ tọa độ cực để đo cung tròn
$$
MODE/PROG,MAN
$$
D(THEO_BOLT_CENTER)=TRANS/XORIG,65,ZORIG,65
$$
WKPLAN/ZXPLAN
$$
F(C1)=FEAT/CIRCLE,INNER,POL,40.0,0.0,-2,0.0,1.0,0.0,5.0
D(THEO_C1_CENTER)=TRANS/XORIG,F(C1),ZORIG,F(C1)
MEAS/CIRCLE,F(C1),3
PTMEAS/POL,2.5,45.0,-2,,-0.707,0.000,-0.707
PTMEAS/POL,2.5,90.0,-2,-1.000,0.000,0.000
PTMEAS/POL,2.5,135.0,-2,-0.707,0.000,0.707
ENDMES
$$
RECALL/DA(THEO_BOLT_CENTER)
Code này sẽ offset gốc tọa độ ban đầu (D1) đến tâm danh nghĩa của đường tròn đi qua tâm 8 lỗ bulong trên mặt phẳng XZ như code trước đó (tạo được hệ trục D2). Sau đó xác định tâm đường tròn C1 dựa theo hệ trục D2 vừa dựng và lại tiếp tục dựng hệ trục mới D3 bằng cách gán tâm C1 làm gốc X và Z. Tiếp theo là sử dụng chế độ PROG mode để đo 3 điểm trên cung tròn có tâm C1 theo hệ trục D3 tại các vị trí (giá trị) của góc cụ thể trong hệ tọa độ cực D3 này. Sau khi đo xong thì lại RECALL lại hệ trục tọa độ D2 để dịch chuyển sang các tâm cung tròn khác trước khi đo theo giá trị góc trên hệ trục dựng được.
Kiểu code này sẽ rất hiệu quả khi đo các cung tròn có bán kính R nhỏ. Bằng việc dựng gốc đo tại tâm lý thuyết của cung tròn, bạn có thể tinh chỉnh tọa độ các điểm chạm theo hệ tọa độ cực để có kết quả đo chính xác của cung tròn đó và đảm bảo được độ chính xác của giá trị bù đầu đo theo vector chạm.
$$
MODE/AUTO,PROG,MAN
$$
D(THEO_ARC_CENTER)=TRANS/XORIG,115,YORIG,20
$$
WKPLAN/XYPLAN
$$
F(ARC_PT1)=FEAT/POINT,POL,72.0,45.0,-0.707,-0.707,0.000
MEAS/POINT,F(ARC_PT1),1
ENDMES
$$
T(R1)=TOL/CORTOL,RADIAL,-0.1,0.1
OUTPUT/FA(ARC_PT1),TA(R1)
Đoạn code trên sẽ xuất kêt quả khoảng cách từ mỗi điểm đo tới tâm lý thuyết của cung tròn. Đây là ứng dụng điển hình và quen thuộc trong các bản vẽ thể hiện biên dạng của bề mặt sản phẩm. Bằng cách này, có thể nội suy ra được biên dạng sản phẩm thông qua khoảng cách từ các điểm đo tới 1 tâm ảo (lý thuyết) được chỉ định trên bản vẽ. Thay vì cố gắng đo cung tròn và tính toán dựa trên kết quả dựng hình từ các điểm đo trên cung tròn đó (như tọa độ tâm, đường kính…). Kết quả này sẽ ko chính xác, đặc biệt với các cung tròn có bán kính R nhỏ. Nếu ko tin, bạn có thể thử đo nhiều lần 1 cung tròn có bán kính R = 2,5mm và vùng chạm chỉ là 1/4 đường tròn, khi đó mỗi lần đo bạn sẽ ra một giá trị tâm cung tròn và đường kính khác nhau. Nhưng khi lấy 1 tâm lý thuyết và đo tới các điểm này để tính khoảng cách R tới tâm lý thuyết đó thì kết quả sẽ ổn định giữa các lần đo. Đặc biệt sẽ cực kỳ chính xác và ổn định khi bạn ứng dụng phương pháp đo qua hệ tọa độ cực đã trình bày ở trên.