
LỜI MỞ ĐẦU
Trong chuỗi bài viết về máy CMM, mình sẽ chia sẻ kinh nghiệm sử dụng và một số kiến thức liên quan đến máy đo CMM.
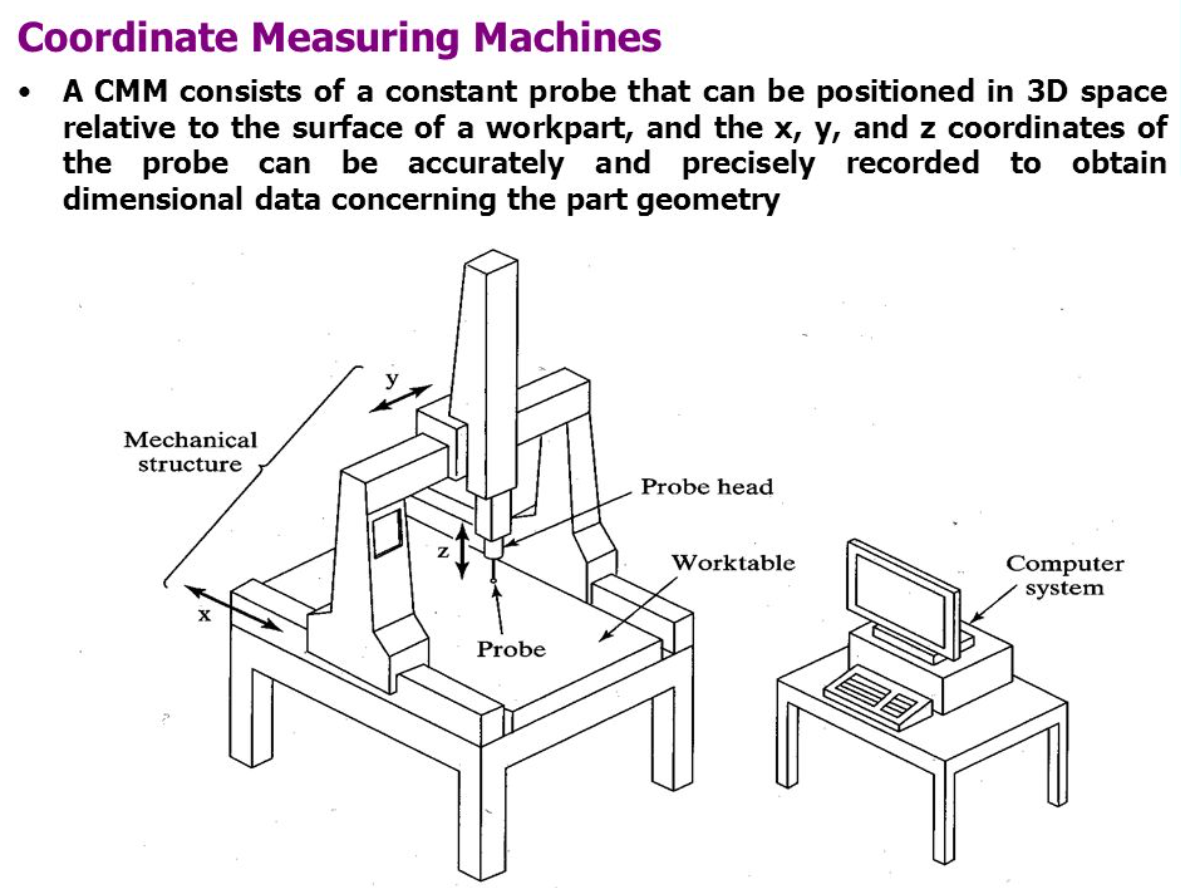
Đầu tiên là giải thích một chút về thuật ngữ CMM. Máy đo 3D hay còn gọi là máy đo toạ độ (Coordinate Measuring Machine, viết tắt là CMM) hoạt động theo nguyên lý dịch chuyển một đầu dò để xác định tọa độ các điểm trển một bề mặt của vật thể. CMM thường thiết kế với 4 phần chính: Thân máy, Đầu do, Hệ thống điều khiển (máy tính) và Phần mềm đo.
CMM có rất nhiều maker khác nhau và đi kèm đó là rất nhiều phần mềm sử dụng cho từng hãng máy. Mặc dù phạm vi sử dung của máy khá đa dạng cho việc đo kiểm sản phẩm của các ngành nghề sản xuất khác nhau, tuy nhiên tài liệu và các nguồn thông tin hỗ trợ trên mạng lại khá ít ỏi. Trong phạm vi kiến thức cho phép, mình sẽ chia sẻ kinh nghiệm và các kiến thức cơ bản về đo CMM. Các ví dụ trong bài viết sẽ lấy từ thực tế trải nghiệm trên máy đo CMM của Mitutoyo (phần mềm Cosmos) và Nikon LK (phần mềm Camio 8.3).
Thực ra khi đã hiểu bản chất về đo CMM trên một dòng máy bất kỳ thì bạn có thể tiếp cận rất dễ dàng và nhanh chóng trên các dòng máy CMM khác. Sự khác biệt về phần mềm chỉ tạo nên sự khác biệt về cấu trúc lệnh và giao diện, còn bản chất xây dựng hệ trục tọa độ thì không hề thay đổi.
XÂY DỰNG HỆ TRỤC TỌA ĐỘ
Bạn có thể tìm hiểu thêm thông tin trên Wikipedia về một số hệ trục tọa độ. Thông thường chúng ta hay sử dụng hệ tọa độ Descartes, một số trường hợp do đặc thù lắp ráp và hoạt động thực tế của sản phẩm nên bên thiết kế cần sử dụng hệ tọa độ cầu. Các bạn tham khảo thêm tại đây. Hệ trục tọa độ được coi là chuẩn tham chiếu.
Khi bạn sử dụng bất kỳ một máy đo kích thước nào thì việc đầu tiên chúng ta đều phải xác định và xây dựng chuẩn tham chiếu. Thực tế tất cả chúng ta đều tiếp cận với chuẩn tham chiếu với một hình thức nào đó. Ví dụ bạn đi khám sức khỏe và bạn có hạng mục đo chiều cao. Giá trị chiều cao của bạn sẽ được phản ánh theo giá trị tham chiếu của bạn trên thước đo tính từ gốc 0 (mặt sàn đo) tới đỉnh đầu. Thực chất đây là một hình thức đo 2D, tuy nhiên bạn chỉ xác định giá trị tham chiếu trên 1 trục (1D) vì giá trị tham chiếu còn lại bằng 0 khi bạn đứng song song với thước đo.
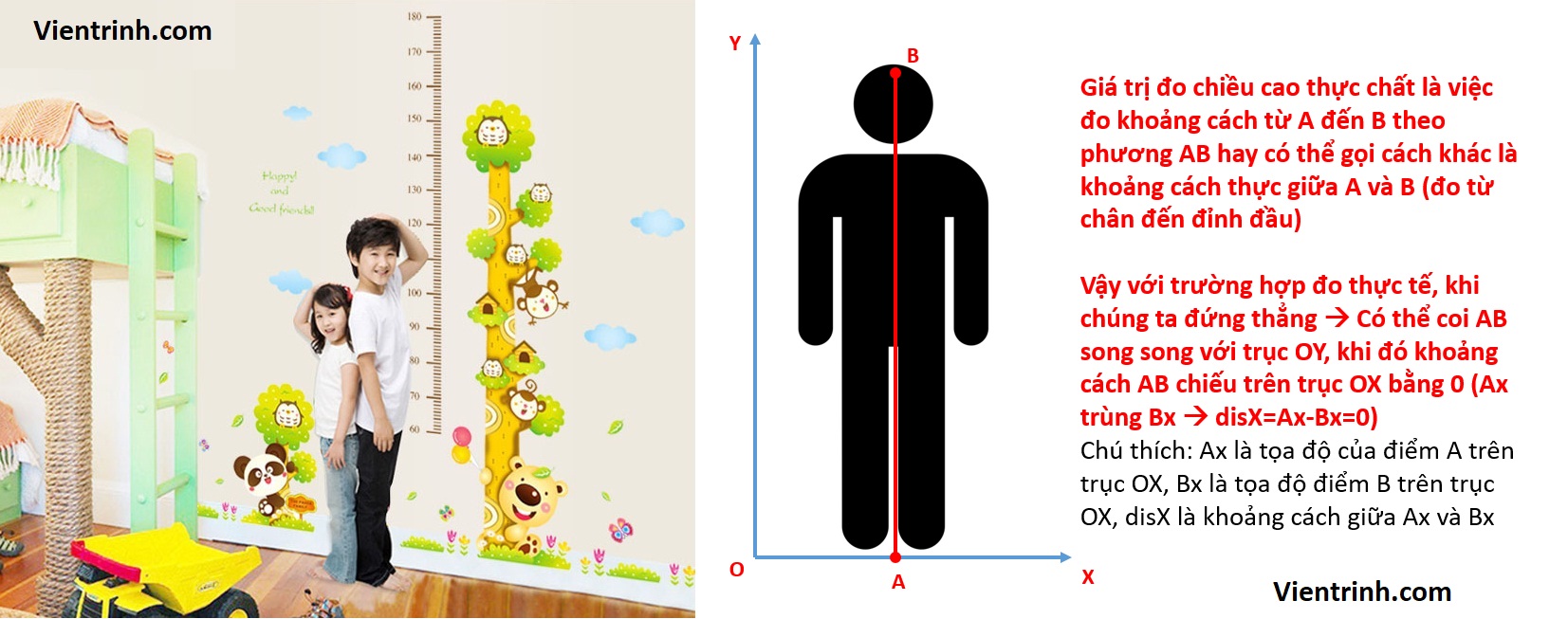
Đó là một ví dụ thực tế mà bất kỳ ai cũng đã từng tiếp cận, tuy nhiên trong ví dụ này, do có sự trùng hợp nên chúng ta có thể lấy giá trị trên trục OY (disY=|Ay-By|). Vậy một tình huống đặt ra là nếu AB không song song với OY thì kết quả đo được xác định như thế nào. Chắc chắn là phải dùng đến Pitago để tính khoảng các thực AB dựa trên kết quả tham chiếu trên trục OX và OY.
![]()
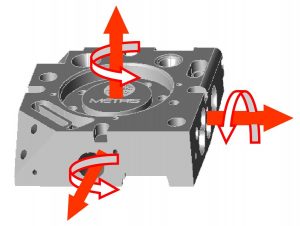
Cả hai tình huống đưa ra ở trên chúng ta đều đang hướng tới đo khoảng cách thực tế. Tuy nhiên, trong lĩnh vực đo kiểm kích thước sản phẩm, thông thường cần kiểm soát kích thước theo các phương chiếu được chỉ định sẵn trong bản vẽ thiết kế. Một sản phẩm thường được lắp ráp từ rất nhiều linh kiện khác nhau, và bản chất của lắp ráp là định vị và kẹp chặt (các bộ phận chuyển động sẽ được định vị – không kẹp chặt). Về lý thuyết định vị trong không gian 3 chiều, chúng ta có 6 bậc tự do (3 tịnh tiến và 3 xoay). Căn cứ vào thực tế lắp ráp người thiết kế cần đưa ra các thông số kích thước theo các phương chiếu phù hợp với trạng thái lắp ráp để khống chế các bậc tự do cần thiết và thể hiện chúng trên bản vẽ.
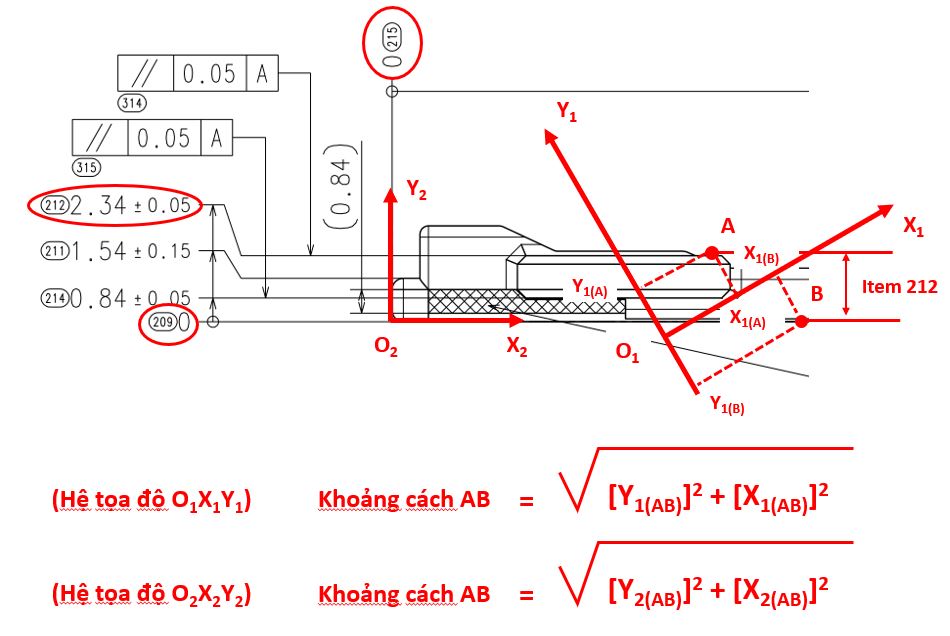
Ví dụ với kích thước bản vẽ đề cập như ở hình trên. Quy cách bản vẽ yêu cầu bắt buộc phải kiểm soát kích thước theo các phương chiếu trên hệ trục tọa độ OXY(2). Trong khi hệ tọa độ của máy là OXY(1).
Trong trường hợp cần tính khoảng cách từ A đến B theo phương Y2. Trên bản vẽ thể hiện bằng item 212. Vậy với hệ tọa độ OXY(1) của máy, chúng ta chỉ tính được khoảng cách thực tế từ A đến B qua tọa độ của A và B trên hệ trục tọa độ OXY(1) theo Pitago qua công thức.

Chúng ta không thể xác định được kích thước item 212 trong ví dụ trên nếu chúng ta không xác định và xây dựng được hệ trục tọa độ OXY(2) theo quy cách bản vẽ. Hay nói cách khác, chúng ta cần xác định được hệ trục tọa độ của vật và xây dựng tương quan giữa hệ trục tọa độ của dụng cụ đo với hệ trục tọa độ của vật. Qua đó chúng ta sẽ đo được giá trị theo yêu cầu trên hệ trục tọa độ của vật thông qua hệ trục tọa độ của dụng cụ đo.
Nghe đến đây chúng ta có thể sẽ cảm thấy hơi trừu tượng và phức tạp, nhưng các bạn sẽ hiểu rõ hơn thông qua ví dụ rất đơn giản sau đây
VÍ DỤ TƯƠNG QUAN HỆ TRỤC TỌA ĐỘ CỦA VẬT VÀ DỤNG CỤ ĐO
Ví dụ trường hợp đo 2D trong thực tế, khi bạn vẽ một hình đa giác ra một tờ giấy. Sau đó bạn sử dụng thước kẻ để đo kích thước của một cạnh của hình mà mình vừa vẽ ra.
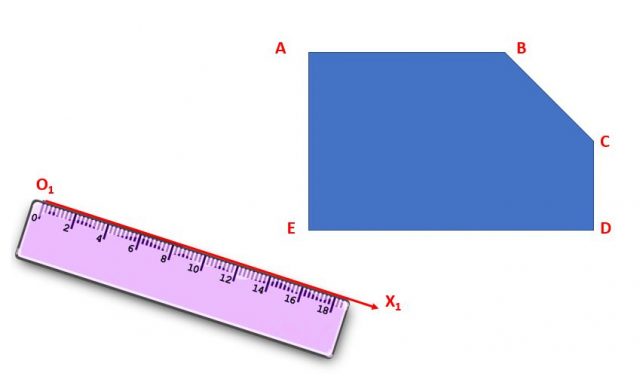
Trường hợp bạn cần đo kích thước từ E đến D. Để đo được bằng thước kẻ ở trên, bạn sẽ đặt thước song song và áp vào cạnh ED.
Về bản chất, thao tác của bạn chính là việc dịch chuyển hệ trục tọa độ của thước OX(1) để điểm E và D nằm trên trục của thước. Mặc dù thao tác này rất bản năng (tự nhiên), tuy nhiên về mặt đo lường, có thể coi đó là một phép dịch chuyển hệ trục tọa độ. Hay nói một cách to tát hơn chính là bạn đã dựng một hệ trục tọa độ để có thể tính được khoảng cách ED qua tọa độ điểm E và D trên dụng cụ đo đang có (thước kẻ)
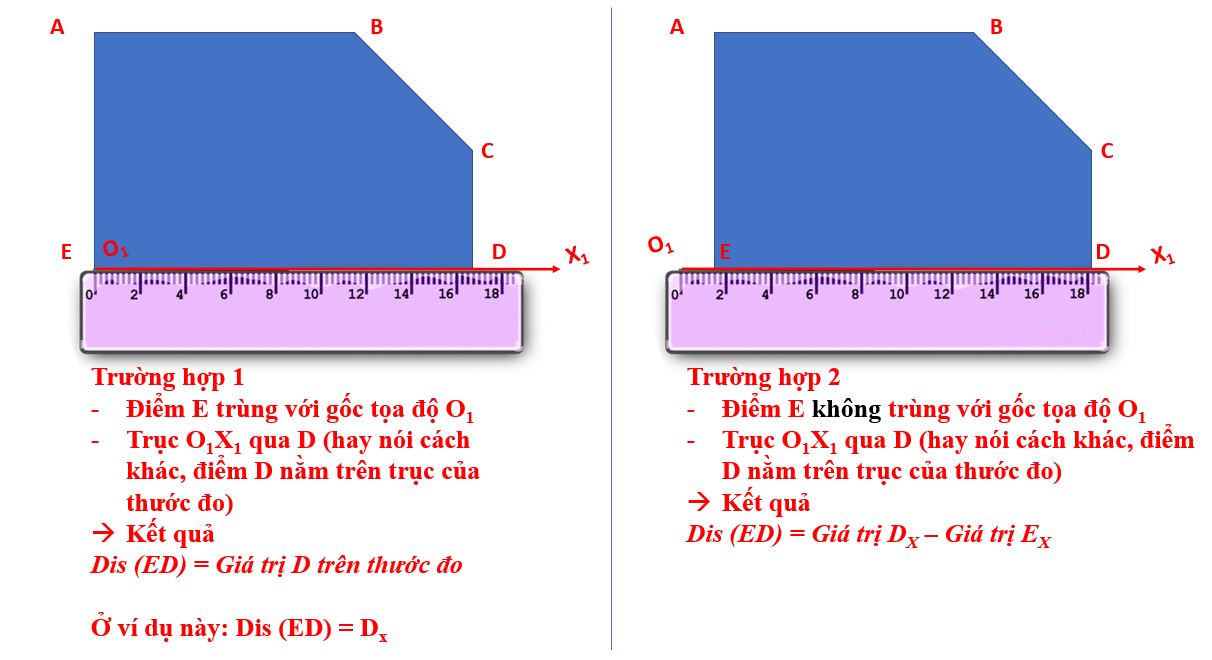
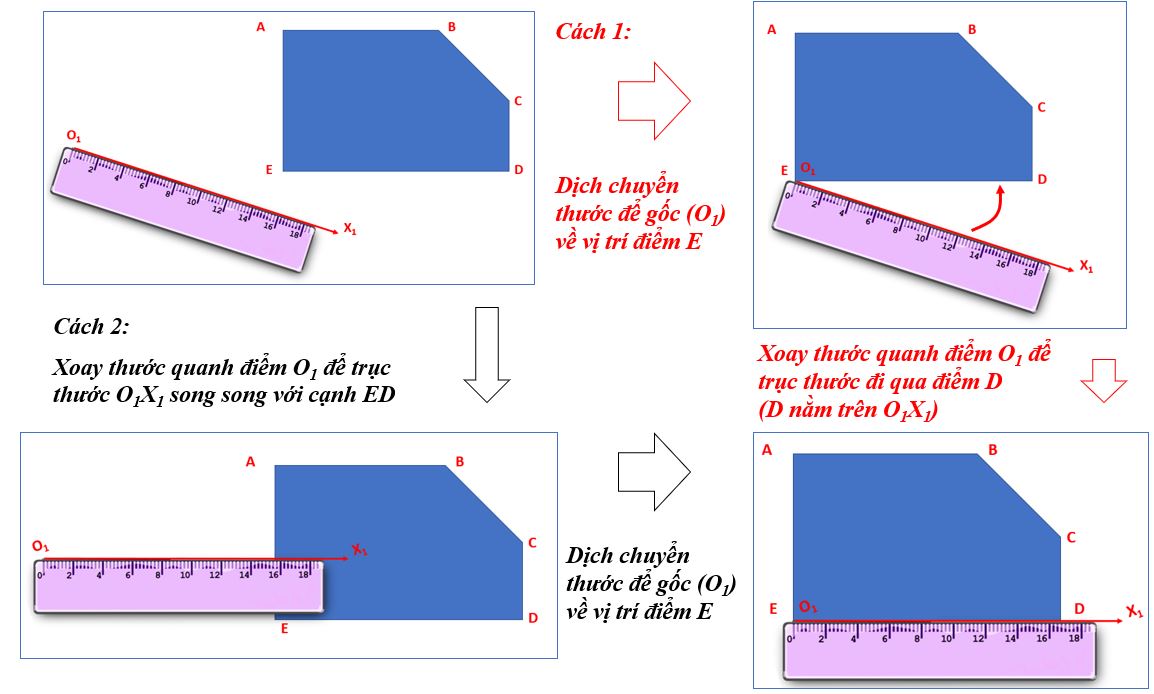
Ở phần giải thích phía trên, bạn có thể thấy hệ trục tọa độ được dịch chuyển thông qua việc bạn di chuyển và điều chỉnh thước kẻ. Vậy về bản chất dựng hình thì hệ tọa độ thay đổi như thế nào qua thao tác dịch chuyển thước sẽ được giải thích bên dưới.
(Thực ra đây chính là bản chất xây dựng hệ trục tọa độ của máy đo 2D, hệ trục tọa độ được thay đổi qua một loạt phép dựng hình như tịnh tiến và xoay quanh các trục tọa độ)
LỜI KẾT
Bản chất đo kích thước bang một số dụng cụ đo cơ bản (có nhiều dụng cụ đo khác mình không hiểu rõ bản chất nên chỉ đề cập là một số dụng cụ đo cơ bản) là quá trình xác định đại lượng cần đo với chuẩn tham chiếu. Trong đó chuẩn tham chiếu ở đây chính là hệ trục của dụng cụ đo. Nó có thể là dạng 1D (1 chiều) như thước kẹp, Panme… hoặc dạng 2D như máy đo QV, Microscope, … hoặc dạng 3D như máy đo CMM.
Giá trị kết quả đo được tính toán dựa trên tương quan tọa độ của các vị trí cần đo trong hệ tọa độ của dụng cụ đo. Để giá trị tương quan này đáp ứng được theo đúng yêu cầu đo lường (của bản vẽ hoặc nhu cầu thực tế), cần xây dựng tương quan hệ tọa độ của dụng cụ đo và hệ tọa độ theo yêu cầu của bản vẽ. (Các dụng cụ đo dạng dưỡng kiểm như Pin gauge, Block Gauge,… hay các máy đo đặc thù thì mình không hiểu rõ nên xin không đề cập ở đây. Bài viết này chỉ nhằm làm tiền đề cho các nội dung liên quan đến việc lập hệ trục tọa độ khi đo CMM)
Việc xây dựng tương quan này được gọi là bước xây dựng hệ trục tọa độ.
Bài viết tiếp theo sẽ đề cập tới các yếu tố cần thiết để xác định một hệ trục tọa độ và các phương pháp xây dựng hệ trục tọa độ thỏa mãn các yếu tố này.