
Tiếp nối bài viết về thực hành dựng hệ trục tọa độ của vật (PCS – Part Coordinate System). Bài viết này sẽ đề cập tới cách dựng hệ trục PCS trên máy CMM của hang Nikon sử dụng phần mềm Camio 8.
Do đặc thù công việc và đặc tính của sản phẩm trong công ty mình đã và đang làm, phạm vi sử dụng máy CMM chỉ liên quan đến lĩnh vực đo điểm. Nên sẽ không đề cập tới phương pháp đo scan. Tuy nhiên mình nghĩ phương pháp tiếp cận sẽ giống nhau.
Mình lựa chọn viết bài thực hành trên máy CMM Nikon trước, vì máy CMM Mitutoyo đã rất phổ biến nên khi mọi người đã hiểu về hệ trục tọa độ thì có thể áp dung một cách dễ dàng cho máy CMM Mitutoyo. Ngoài ra, hiện tại có mấy bạn trong công ty đang tiếp cận và có nhu cầu tìm hiểu máy CMM Nikon.
Nội dung bài viết sẽ đi luôn vào các bước thao tác dựng hệ trục PCS. Với những bạn lần đầu làm quen với máy thì có thể đọc thêm bài giới thiệu tổng quan về CMM Nikon.
MỘT SỐ LƯU Ý TRƯỚC KHI TIẾN HÀNH ĐO
Để kết quả đo chính xác và an toàn cho thiết bị đo, cần phải thống nhất được tiêu chuẩn đo và phương pháp đo. Chúng ta cần đảm bảo các yếu tố sau trước khi tiến hành đo
- Kiểm tra máy và thiết bị phụ trợ đạt chuẩn
- Máy vận hành trong điều kiện chuẩn (Nhiệt độ 20ºC±2ºC; độ ẩm 55% ~ 65%; áp suất khí, máy sấy khí…)
- Các góc đo và đầu đo sử dụng trong quá trình đo phải được hiệu chuẩn
- Kích thước vật đo và gá phải nằm trong không gian của máy đo (theo kích thước các trục máy đo)
- Dụng cụ gá đạt chuẩn và có phương pháp gá đặt rõ ràng.
- Nên căn chỉnh Jig gá song song với các trục của máy
- Chỉ những người đã được đào tạo mới được vận hành máy (hoặc phải có sự giám sát trực tiếp của người có chuyên môn)
- Tuân thủ các quy định khác tại nơi làm việc.
- Trong quá trình vận hành, khi xảy ra sự cố, cần giữ nguyên hiện trạng và báo cấp trên để xin hỗ trợ (không tự ý xử lý lỗi khi chưa được đào tạo)
TẠO CHƯƠNG TRÌNH ĐO MỚI
Tạo một chương trình đo mới sau khi đã kiểm tra các hạng mục ở trên.
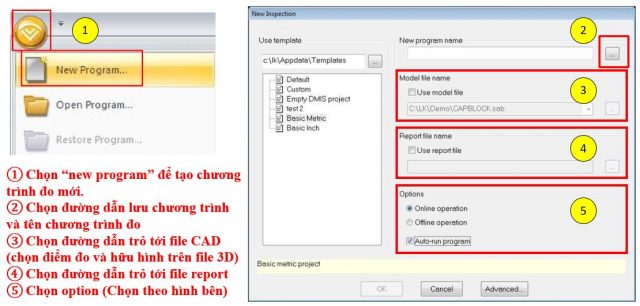
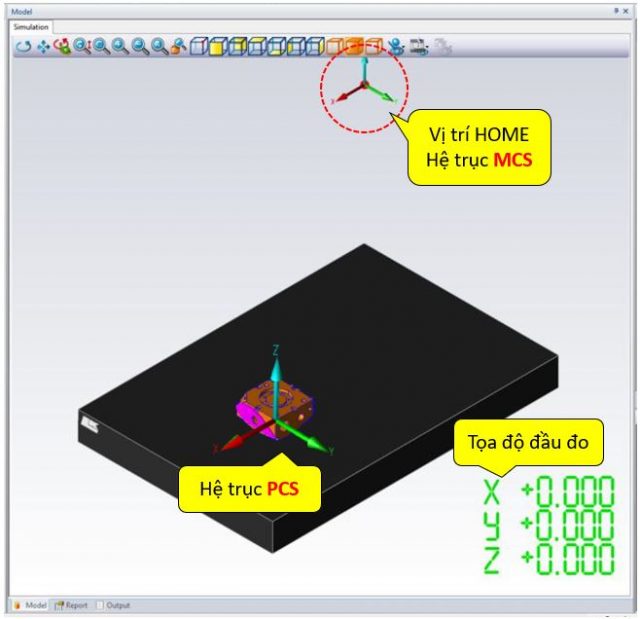
Sau khi chọn chương trình, trong cửa sổ Model ta sẽ thấy máy mô phỏng không gian hệ trục tọa độ của máy đo CMM và hệ trục tọa độ của máy MCS
Trong hình bên dưới, khi đặt lệnh cho máy di chuyển về vị trí “Home Position” (khi khởi động – máy sẽ tự kiểm tra khả năng di chuyển của các trục và di chuyển về vị trí “home position”.
Khi đó, DRO hiển thị tọa độ X, Y, Z thể hiện tọa độ đầu đo tại vị trí Home sẽ là 0,0,0. Đây là vị trí gốc của hệ trục tọa độ MCS được máy định nghĩa. (Tham khảo bài viết dựng hệ trục tọa độ để tìm hiểu về MCS và PCS)
XÁC ĐỊNH HỆ TRỤC PCS
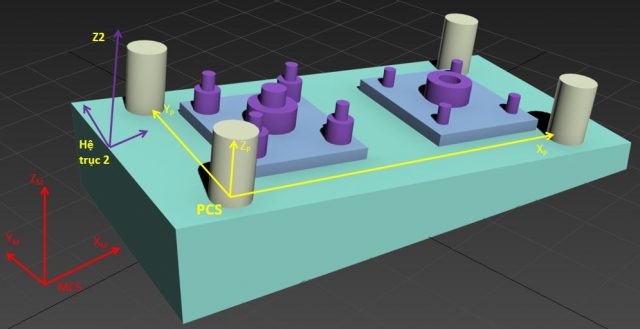
Chúng ta quay trở lại ví dụ trong bài viết trước. Chúng ta quan sát tương quan giữa hệ trục MCS và PCS, sau đó sẽ thực hiện các bước dựng hệ trục PCS trên máy CMM Nikon sử dung phần mềm Camio 8.
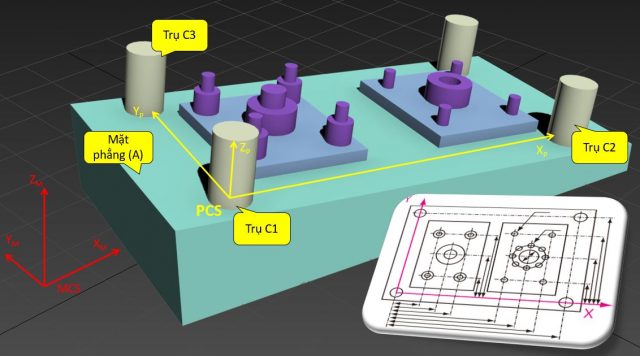
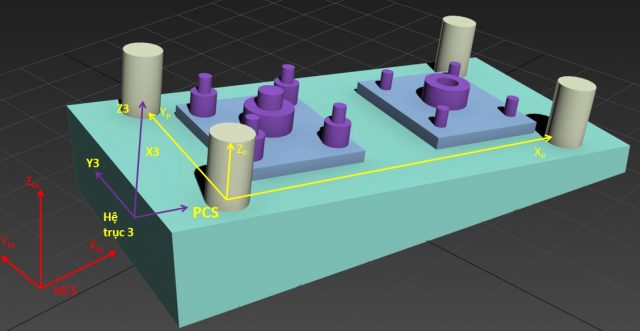
Trong ví dụ này, từ bản vẽ 2D chúng ta xác định hệ trục PCS dựa trên 3 yếu tố chính
- Mặt phẳng tham chiếu (mặt A)
- Trục tham chiếu nằm trên mặt phẳng tham chiếu A (là trục tạo bởi đường thẳng qua tâm trụ C1 chiếu trên mặt A và trụ C2 chiếu trên mặt A)
- Gốc của trụ tham chiếu (tâm trụ C3 chiếu trên mặt A)
DỰNG HỆ TRỤC PCS
Xác định mặt phẳng tham chiếu:
Đo mặt phẳng A trong hệ tham chiếu MCS (tạm gọi là hệ trục 1). Để CMM định nghĩa mặt phẳng, cần xác định tọa độ của ít nhất 3 điểm trên mặt phẳng cần đo.
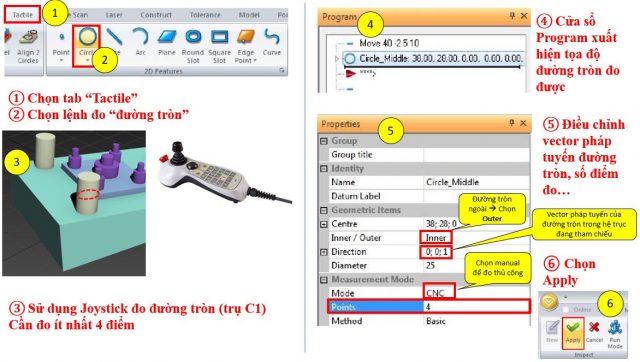
Trình tự thực hiện trên máy CMM Nikon: Chọn Tactile → Điều kiển Joystick đo 4 điểm trên mặt A → Điều chỉnh vector đo → Chọn Apply
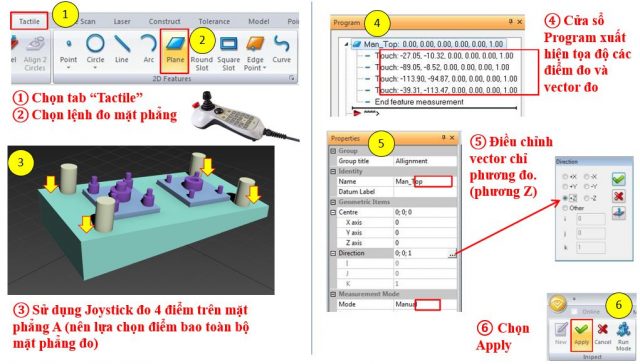
Trong phần này, cần lưu ý bước 5. Về vector chỉ phương đo. Trong quá trình đo bằng Joystick, khi bạn điều kiển máy đo theo phương Z (ví dụ đo thẳng xuống bàn đá). Nhưng trong cửa sỏ program cho thấy vector chỉ phương đo hiếm khi trùng với Z
Trục Z trong MCS hướng thẳng lên trên và vuông góc với mặt phẳng bàn đá, khi đo thẳng xuống bàn đá (ngược hướng với Z+). Vector đo của máy Nikon là (0,0,1), của máy Mitutoyo là (0,0,-1). Trong máy CMM, luôn lấy vector đơn vị làm vector đo. (search google để biết vector đơn vị là gì – đây là kiến thức ở trung học phổ thông)
Trong ví dụ này, chọn vector đo là +Z (0,0,1) vì được thực hiện bằng máy đo CMM Nikon.
*———*
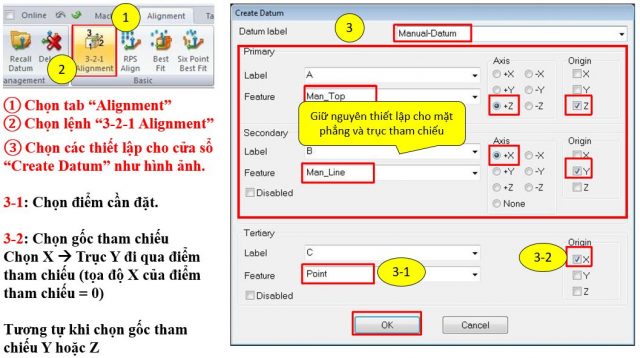
Tiếp theo, cần gán mặt phẳng vừa đo làm mặt tham chiếu (set alignment and the origin for this plane).
Khi đặt mặt A làm mặt tham chiếu. Có nghĩa là đặt mặt A làm mặt XOY, tất cả các điểm nằm trên mặt A có giá trị Z=0.
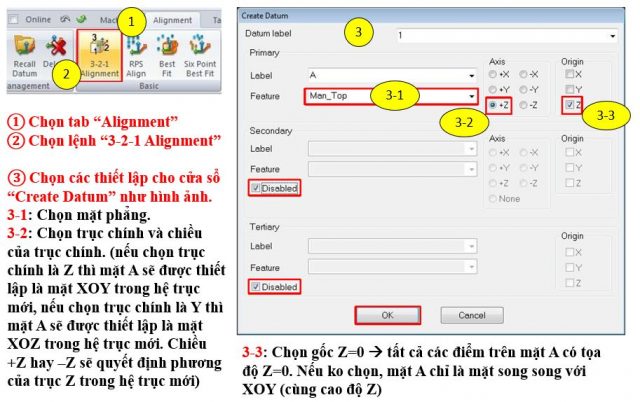
Sau bước này, máy đã tạo ra hệ trục 2. Thỏa mãn mặt A là mặt XOY trong hệ trục này (tất cả các điểm trên mặt A có tọa độ Z = 0)
Trong phần này, cần lưu ý bước 3-2. Việc chọn vector trục chính sẽ quyết định mặt phẳng A là mặt phẳng nào trong hệ trục 2. Và chiều của trục tọa độ tương ứng trong hệ trục 2.
Bạn cần tư duy đúng để có thể thực hiện được chính xác hệ trục tọa độ PCS. (nhiều người dựng ngược hệ trục và không thể đo được khi bản vẽ chỉ định đo các điểm theo tọa độ PCS trong bản vẽ)
Bạn có thể hình dung hệ trục 2 thu được như bên dưới. Chúng ta xác định được XOY là mặt A. Và chưa quan tâm vội tới hướng và gốc của trục X, Y. Chúng sẽ được giải quyết trong các bước tiếp theo.
Xác định trục tham chiếu (trong mặt phẳng tham chiếu vừa thiết lập)
Trục tham chiếu trên mặt tham chiếu sẽ là 1 đường thẳng trên mặt phẳng tham chiếu. Để xác định đường thẳng (line). Chúng ta cần xác định tọa độ của ít nhất 2 điểm trên line đó.
Thông thường chúng ta có thể đo trực tiếp tọa độ của 2 điểm để xác định line. Tuy nhiên với ví dụ trong bài viết này, chúng được xác định gián tiếp qua tâm của 2 trụ C1 và C2. Hay nói cách khác, chúng là tâm của 2 đường tròn xác định trên 2 trụ C1 và C2
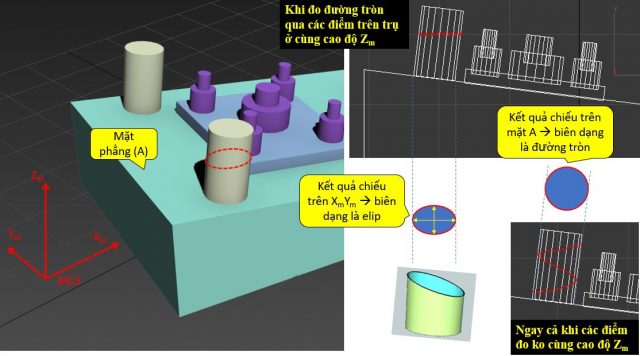
Do tọa độ điểm dùng để dựng line được xác định dán tiếp qua tâm đường tròn trên trụ C1 và C2. Nên có một vấn đề nảy sinh đó là hình chiếu của đường tròn trên trụ C1 và C2 sẽ khác biệt khi chiếu lên mặt phẳng XY của hệ trục MCS so với khi chiếu lên mặt A.
Khi chiếu lên mặt XY của hệ trục MCS, kết quả thu được sẽ là một Elip. (Trừ khi đo ở mặt phẳng song song với A). Khi chiếu lên mặt A thì sẽ luôn thu được kết quả là một đường tròn (ngay cả khi bắt điểm ở các cao độ khác nhau)
Lỗi phổ biến với nhiều bạn khi thiết lập hệ trục tọa độ là đo một loạt các đối tượng trong hệ trục MCS sau đó mới thiết lập căn chỉnh hệ trục.
- Đo mặt phẳng A trong hệ trục MCS
- Đo đường tròn C1, C2, C3 trong hệ trục MCS (trong khi thực tế chúng là elip, nhưng ép kiểu đối tượng đo là đường tròn nên máy sẽ tính toán để định nghĩa đường tròn trong hệ trục MCS) → Tọa độ tâm đường tròn không chính xác.
- Tạo line qua tâm C1, C2 đã xác định ở trên.
- Dựng hệ trục PCS* bằng một tổ hợp nhóm câu lệnh (định nghĩa mặt tham chiếu, trục tham chiếu, gốc tọa độ). Tuy nhiên ở đây tồn tại một số vấn đề liên quan đến bản chất dựng hình.
- Thực chất việc dựng PCS* qua một nhóm tổ hợp lệnh thì máy CMM vẫn sẽ thiết lập lần lượt từng câu lệnh để dựng hệ trục qua việc định nghĩa từng yếu tố chính
- Đặt mặt A là mặt phẳng tham chiếu XY → tạo hệ trục 2* từ hệ trục MCS
- Chiếu tọa độ tâm C1 và C2 lên mặt A và tạo line qua 2 tâm chiếu này. Sau đó đặt line này làm trục X → Tạo hệ trục 3*
- C1 và C2 không chính xác vì được đo trong MCS → Khi chiếu lên XY (mặt A) trong hệ trục 2 cũng sẽ không chính xác → Trục X của hệ trục 3 không chính xác.
- Chiếu toa độ tâm C3 lên mặt A và đặt tọa độ X của điểm vừa chiếu = 0 (trục Y qua điểm này) → Tạo hệ trục 4* (Là hệ trục PCS*)
- Tương tự như trên, hiển nhiên tọa độ C3 trong MCS cũng ko chính xác nên hệ trục 4* không hoàn toàn chính xác là hệ trục PCS. Có thể sự khác biệt là rất nhỏ, nhưng đo thực sự không phải hệ trục PCS.
- Thực chất việc dựng PCS* qua một nhóm tổ hợp lệnh thì máy CMM vẫn sẽ thiết lập lần lượt từng câu lệnh để dựng hệ trục qua việc định nghĩa từng yếu tố chính
Đây là lý do tôi luôn khuyến cáo các bạn cần làm đúng theo trình tự các bước thiết lập hệ trục tọa độ.
Quay trở lại với ví dụ ở trên về bước tạo trục tham chiếu.
Đo đường tròn C1, C2 và xác định hình chiếu trên mặt phẳng A
Sau bước này, chúng ta dựng được đường tròn C1 trong hệ trục 2.
Tương tự ta đo được đường tròn C2 trong hệ trục 2.
Tuy nhiên, theo đúng quy tắc 3 yếu tố đo hệ trục, chúng ta cần xác định trục tham chiếu trên mặt phẳng tham chiếu (mặt A). Trong khi C1 và C2 dựng được đang không nằm trong mặt tham chiếu (mặt A). Do vậy, trước khi tạo line, cần xác định tâm chiếu của các đường tròn này xuống mặt A.
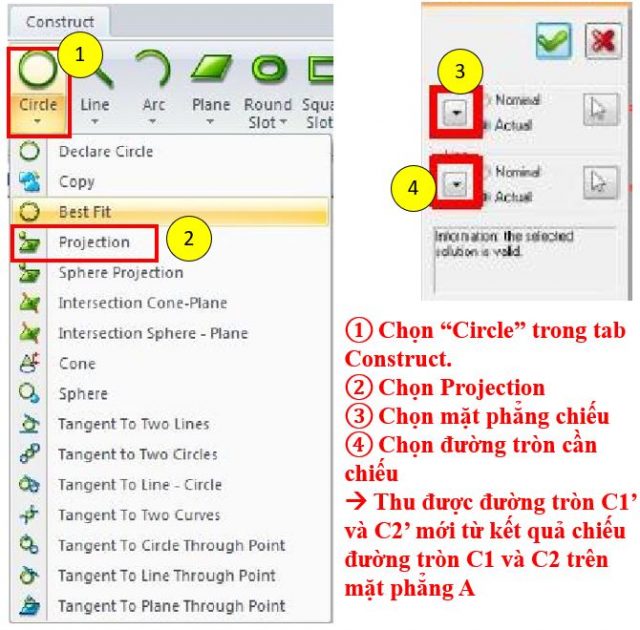
Đến đây ta dựng được đường tròn C1′ và C2′ là hình chiếu của C1 và C2 trên mặt phẳng tham chiếu A.
Tiếp theo, cần dựng trục tham chiếu (line) qua C1′ và C2′
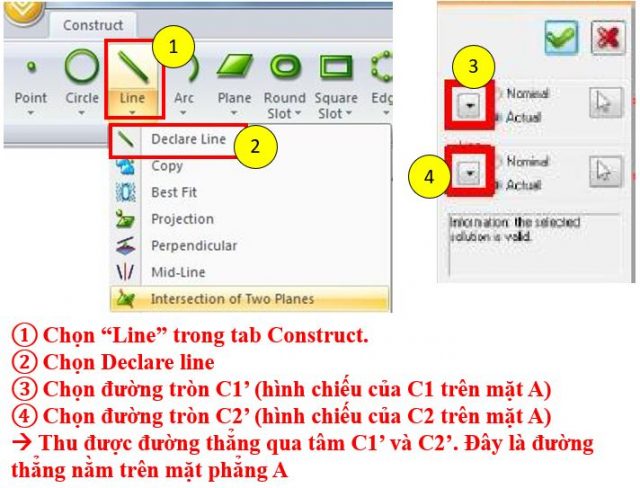
Đến đây, chúng ta đã dựng được line qua tâm chiếu C1, C2 trên mặt phẳng A.
Đặt line vừa tạo là trục tham chiếu trên mặt phẳng tham chiếu của hệ trục 1.
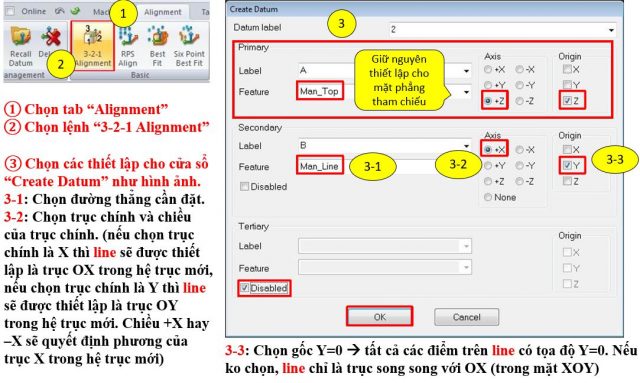
Sau bước này, máy đã tạo ra hệ trục 3. Thỏa mãn mặt A vẫn là mặt XOY trong hệ trục này (tất cả các điểm trên mặt A có tọa độ Z = 0). Trục OX đi qua tâm C1′ và C2′ (là hình chiếu của tâm C1, C2 trên mặt A – chính là mặt XOY trong hệ trục 2 và 3; hay nói cách khác, tất cả các điểm trên đường thẳng qua C1′ và C2′ sẽ có tọa độ Z=0, Y=0)
Bạn có thể hình dung hệ trục 3 thu được sẽ như sau
Tiếp theo là bước xác định yếu tố cuối cùng
Xác định gốc tham chiếu
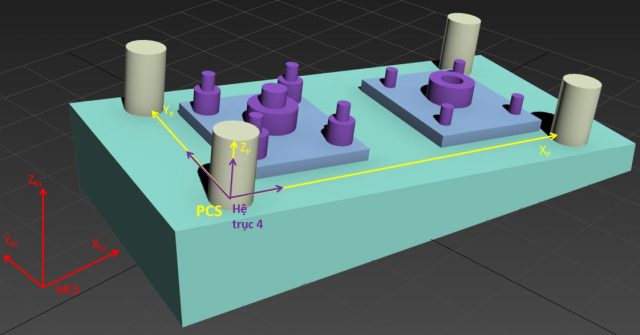
Tương tự như trên. Cần đo đường tròn C3 sau đó chiếu lên mặt A (XOY) để lấy tâm chiếu C3′ và dựng trục sao cho trục Y đi qua C3′ (hay nói cách khá là tọa độ X của C3′ =0)
Và hệ trục 4 thu được sau bước này sẽ trùng với hệ trục PCS.
LỜI KẾT
Để có thể xây dựng được chính xác hệ trục PCS. Chúng ta cần hiểu rõ về bản chất các phép rời hệ trục tọa độ (tịnh tiến, xoay) qua đó xác định được hệ trục thay đổi như thế nào sau các bước dựng hình. Và lựa chọn được đối tượng đo phù hợp (Ví dụ trong bài này, sẽ có sự nhầm lẫn giữa Elip và đường tròn)
Bên cạnh đó, việc tuân thủ trình tự thiết lập là rất quan trọng. Hệ trục tọa độ thay đổi theo từng bước rời hình. Do vậy cần phải thực hiện đúng trình tự để kiểm soát được hệ trục, qua đó sẽ kiểm soát được việc lựa chọn đối tượng đo.
Sau khi đã đo và định nghĩa xong một đối tượng (Ví dụ đường tròn C1 trong hệ quy chiếu MCS). Đặc tính của đối tượng đo sẽ không thay đổi trong các hệ quy chiếu khác nhau (hệ trục 2, hệ trục 3, PCS). Bạn có recall để kiểm chứng. Các thông số đường kính, độ tròn… sẽ ko thay đổi. Việc thay đổi hệ trục chỉ làm thay đổi hệ tọa độ của đường tròn C1 (tọa độ tâm, vector chỉ phương)
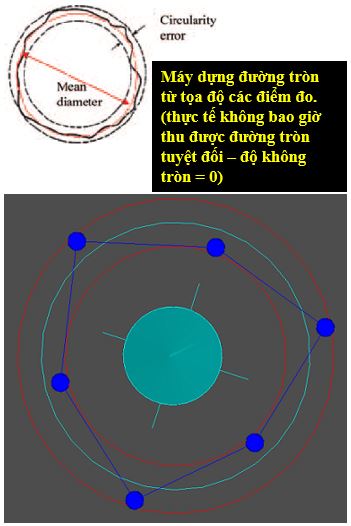
Tuy nhiên, vấn đề nằm ở trước khi bạn đo C1. Khi định nghĩa “kiểu” đối tượng là đường tròn trong MCS. Nếu độ không tròn nằm ở ngưỡng chấp nhận được (hay nói cách khác là máy tính toán được đường tròn từ tọa độ các điểm đo). Khi đó, máy sẽ tính toán và vẽ ra một đường tròn best fit với các điểm đo này.
Điều này có nghĩa là đường tròn C1 thu được trong MCS không chính xác (tọa độ tâm, bán kính, vector chỉ phương…). Vậy nó cũng sẽ không chính xác trong các hệ quy chiếu khác.
Đó chính là lý do chúng ta cần tuân thủ trình tự thiết lập 3 yếu tố xác định hệ trục tọa độ.
Hi vọng bài viết này sẽ hữu ích cho các bạn. Không chỉ với máy CMM Nikon sử dụng phần mềm Camio, theo mình – nguyên tắc này đúng với tất cả các máy đo CMM khác (ít nhất là với Mitutoyo mà mình đã từng rất quen thuộc)