HỆ TRỤC TỌA ĐỘ – MÁY ĐO TỌA ĐỘ CMM
Chúng ta sử dụng hệ tọa độ để mô tả chuyển động của một máy đo tọa độ. Hệ tọa độ cho phép chúng ta xác định vị trí tương đối giữa các đối tượng cần đo trên phôi.
Hệ tọa độ rất giống với một bản đồ cao độ, trong đó một cạnh của bản đồ được đánh dấu bằng các chữ cái, cạnh còn lại được đánh dấu bằng các số. Sự kết hợp của bộ ba (chữ cái, chữ số, cao độ) được gọi là tọa độ. Nó đại diện cho một vị trí cụ thể và duy nhất trong bản đồ này.
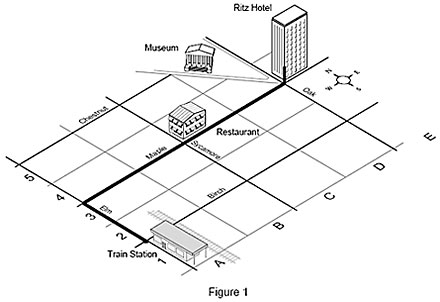
Ví dụ với bản đồ đường phố với các tòa nhà được hiển thị như bên dưới. Một cạnh của bản đồ được đánh số bang các chữ cái (A,B,C,D,E…), cạnh còn lại được đánh dấu bằng các chữ số (1,2,3,4,5…). Và trục còn lại là chiều cao (cao độ các tòa nhà). Mỗi địa điểm trên bản đồ sẽ đại diện bằng bộ ba (chữ cái/ chữ số/ cao độ).
Giả sử vị trí của bạn hiện tại ở ga tàu. Từ trên bản đồ sẽ thấy tọa độ ga tàu trên bản đồ là (A, 1, 1). Nơi bạn ở là tầng 3 của khách sạn Ritz, tọa độ trên bản đồ sẽ là (E, 4,3).
Để đi bộ từ ga tàu (A-1-1) đến nơi bạn ở (E-4-3). Bạn sẽ đi bộ 2 khối dọc theo đường Elm [tọa độ (A-2-1) → (A-3-1)] sau đó đi theo 4 khối dọc đường Maple [tọa độ (A-3-1) → (B-3-1) → (C-3-1) → (D-3-1) → (E-3-1) → (E-4-1)]. Và cuối cùng là lên tầng 3 ở Ritz [tọa độ (E-4-1) → (E-4-2) → (E-4-3)].
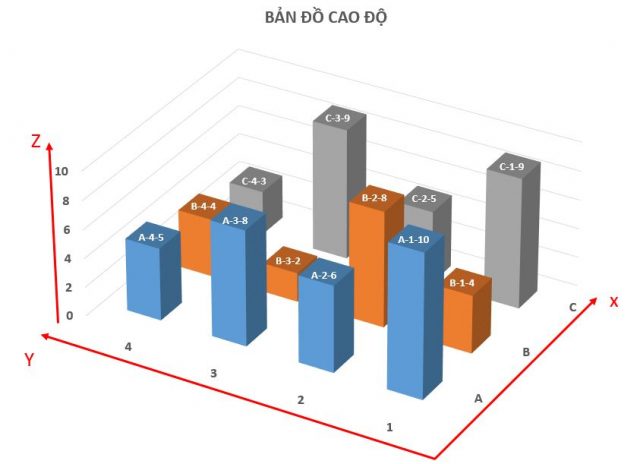
Các cạnh (chữ cái – chữ số – cao độ) tương ứng với các trục X, Y, Z trên máy CMM. Mỗi tọa độ đại diện cho một vị trí duy nhất (một và chỉ một vị trí).
Bạn có thể hình dung tọa độ rõ hơn trong hình minh họa bên dưới về tọa độ của các điểm.
Máy đo tọa độ CMM hoạt động tương tự như cách chúng ta di chuyển ngón tay để theo dõi tọa độ trên bản đồ. Ba trục của nó sẽ tạo thành hệ tọa độ của máy, thay vì ngón tay, CMM sử dung đầu dò để đo các điểm trên phôi. Mỗi một điểm được đại diện bằng bộ 3 giá trị duy nhất của các trục X, Y, Z và bộ giá trị này chính là tọa độ của điểm đo trong hệ tọa độ đang sử dụng.
HỆ TỌA ĐỘ CỦA MÁY (MCS – Machine Coordinate System)
Trong đo lường, có 2 kiểu hệ tọa độ. Đó là hệ trục tọa độ của máy (MCS – Machine Coordinate System) và hệ tọa độ của vật (PCS – Part Coordinate System).
Bạn có thể tìm hiểu thêm về vị trí “Home position” trong hệ trục MCS ở bài viết về thực hành dựng hệ trục tọa độ.
Với hệ tọa độ của máy. Các trục X, Y và Z sẽ song song với trục chuyển động của máy. Thông thường, khi nhìn từ mặt trước của máy. Trục X từ trái qua phải, trục Y từ trước ra sau và trục Z chạy từ trên xuống và vuông góc với 2 trục kia. Tuy nhiên, tùy theo loại máy mà thứ tự và chiều của các trục này sẽ khác đi. Nhưng dù là loại máy nào, các trục XYZ trong hệ trục MCS luôn song song với trục chuyển động của máy.
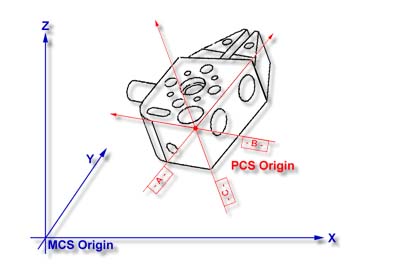
HỆ TRỤC TỌA ĐỘ CỦA VẬT (PCS – Part Coordinate System)
Hệ trục tọa độ này có các trục X, Y, Z liên quan đến đặc tính của vật cần đo và đã được chỉ định trong bản vẽ thiết kế, chế tạo.
Trước kia, khi chưa có phần mềm hỗ trợ dựng hệ trục tọa độ PCS từ hệ trục MCS. Khi tiến hành đo, cần phải căn chỉnh phôi để cạnh của phôi được xếp song song về mặt vật lý với các trục của máy. Khi đó các trục của hệ trục PCS và MCS gần song song với nhau. Điều này rất tốn thời gian và không chính xác.
Vì thực tế việc căn chỉnh song song chỉ mang tính vật lý, khó tính toán chính xác. Ngoài ra, khi cạnh của phôi dạng bo tròn hoặc viền thay vì hình vuông, chữ nhật thì việc đo theo phương pháp này gần như là bất khả thi.
Nội dung tiếp theo: Căn chỉnh hệ trục tọa độ – CMM alignment